ROBUILDER
AI-trained agents for autonomous brick construction using simulation-driven reinforcement learning
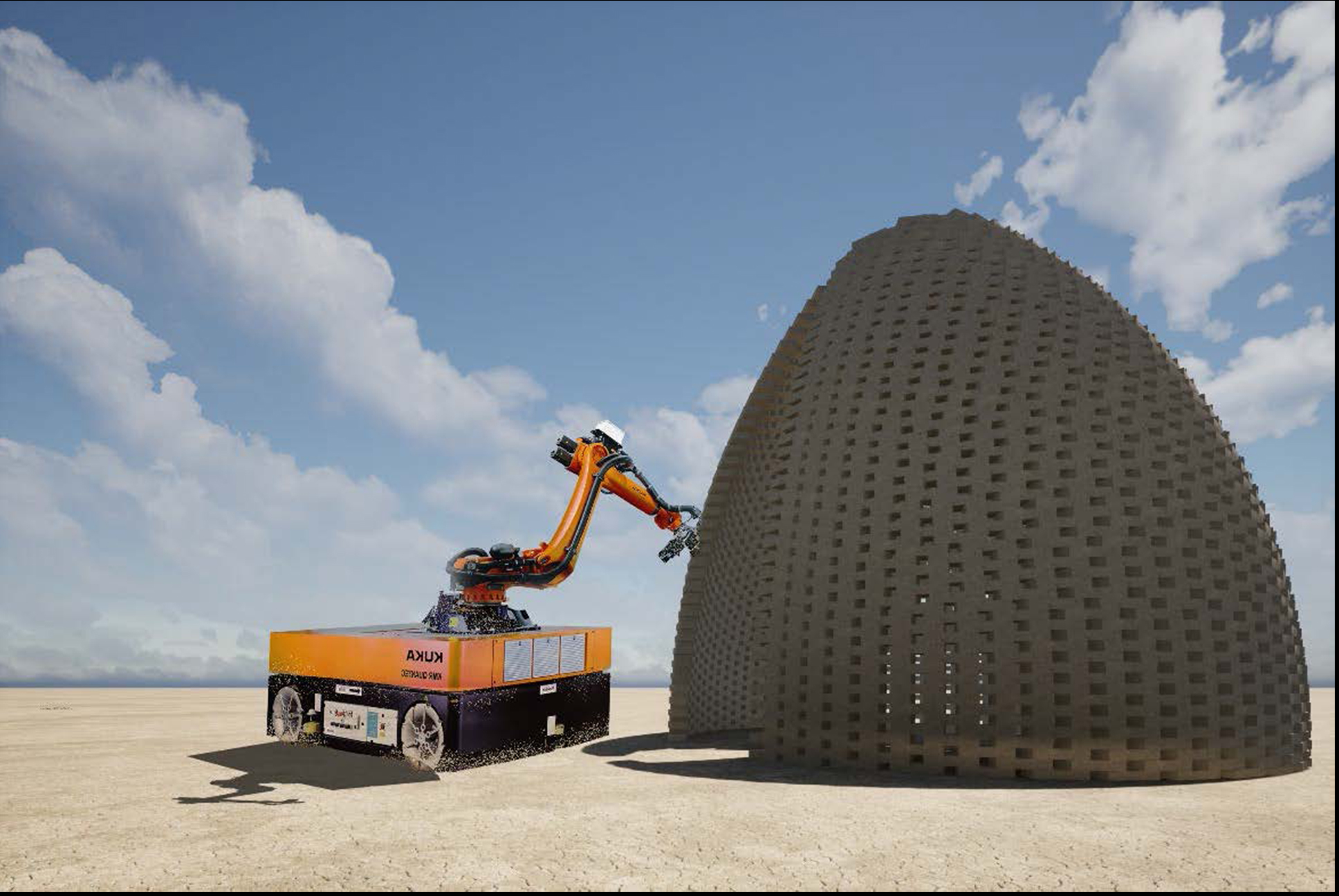
This project outlines a framework for autonomous design and construction informed by the success of deep reinforcement learning (DRL) algorithms in real-time strategy (RTS) games. The proposed approach merges AI, digital fabrication, and robotics to overcome data fragmentation and inefficiencies in current architectural workflows. By translating sequential operations into iterative cycles and simulating design-construction feedback in virtual environments, the framework allows agents to learn optimal strategies under human supervision. These strategies are later executed by robotic systems. A proof-of-concept, featuring the design and construction of a brick pavilion, demonstrates the viability of the framework using DRL-trained agents in a game-like simulation environment.
The construction industry struggles with inefficiency, waste, and disconnected design-execution workflows. While tools like BIM exist, they fall short in bridging disciplinary gaps. This project uses AI agents trained in simulation to learn construction planning from human supervision. Challenges include encoding expert knowledge into machine-readable formats, ensuring cross-disciplinary integration, and managing complex, multi-objective tasks.
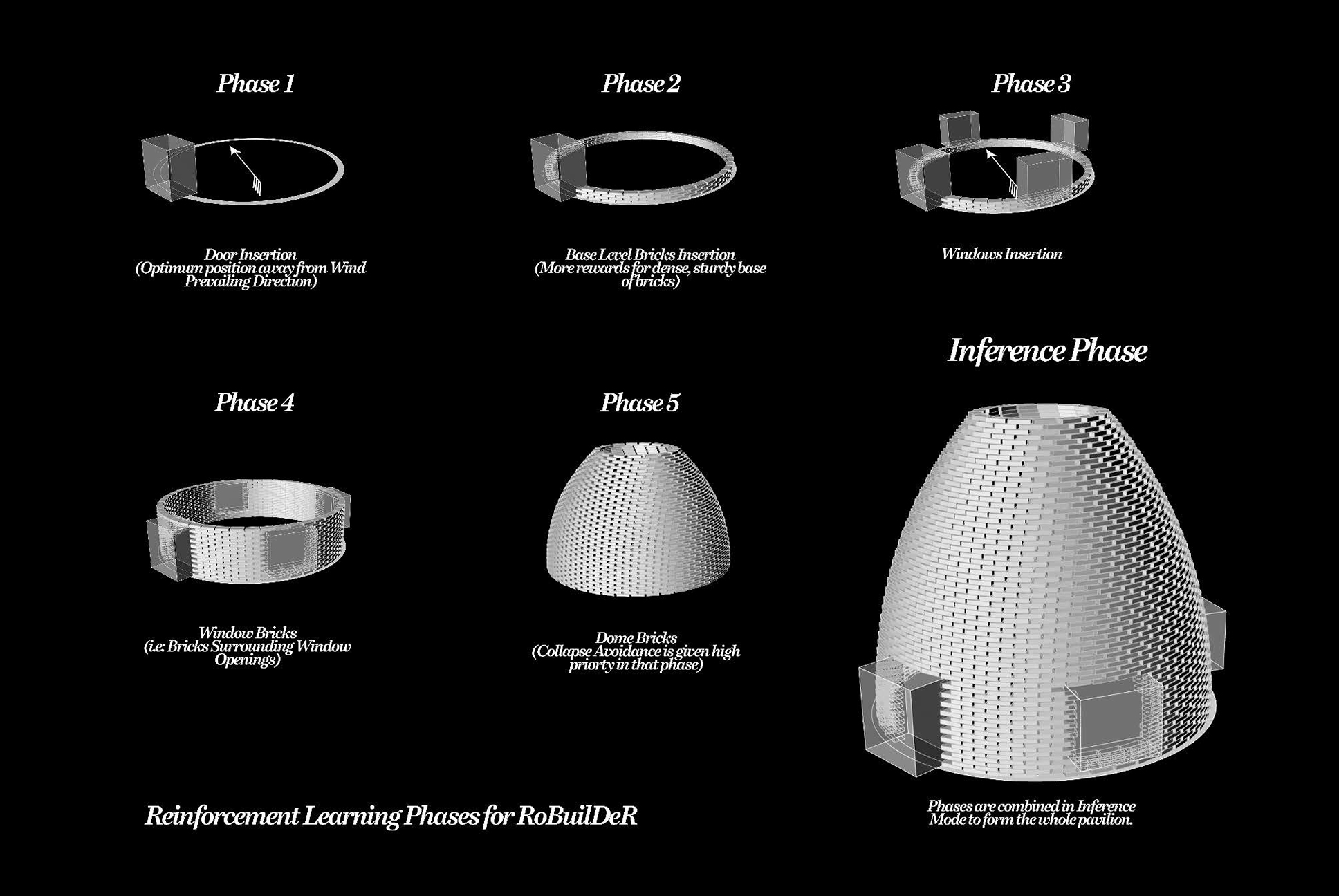
The framework comprises five stages: establishing design intent, capturing site data, setting project goals, training AI agents, and robotic execution. The simulation environment incorporates real-world conditions through sensor and drone data. Design and construction goals are formalized into Markov Decision Processes (MDPs), enabling agents to learn policies that fulfill multi-objective tasks. Training occurs in parallelized environments using Proximal Policy Optimization (PPO). Separate neural networks guide different construction elements. A human-supervised interface tests and refines rewards schemes and task parameters, creating an iterative loop between simulation and training.
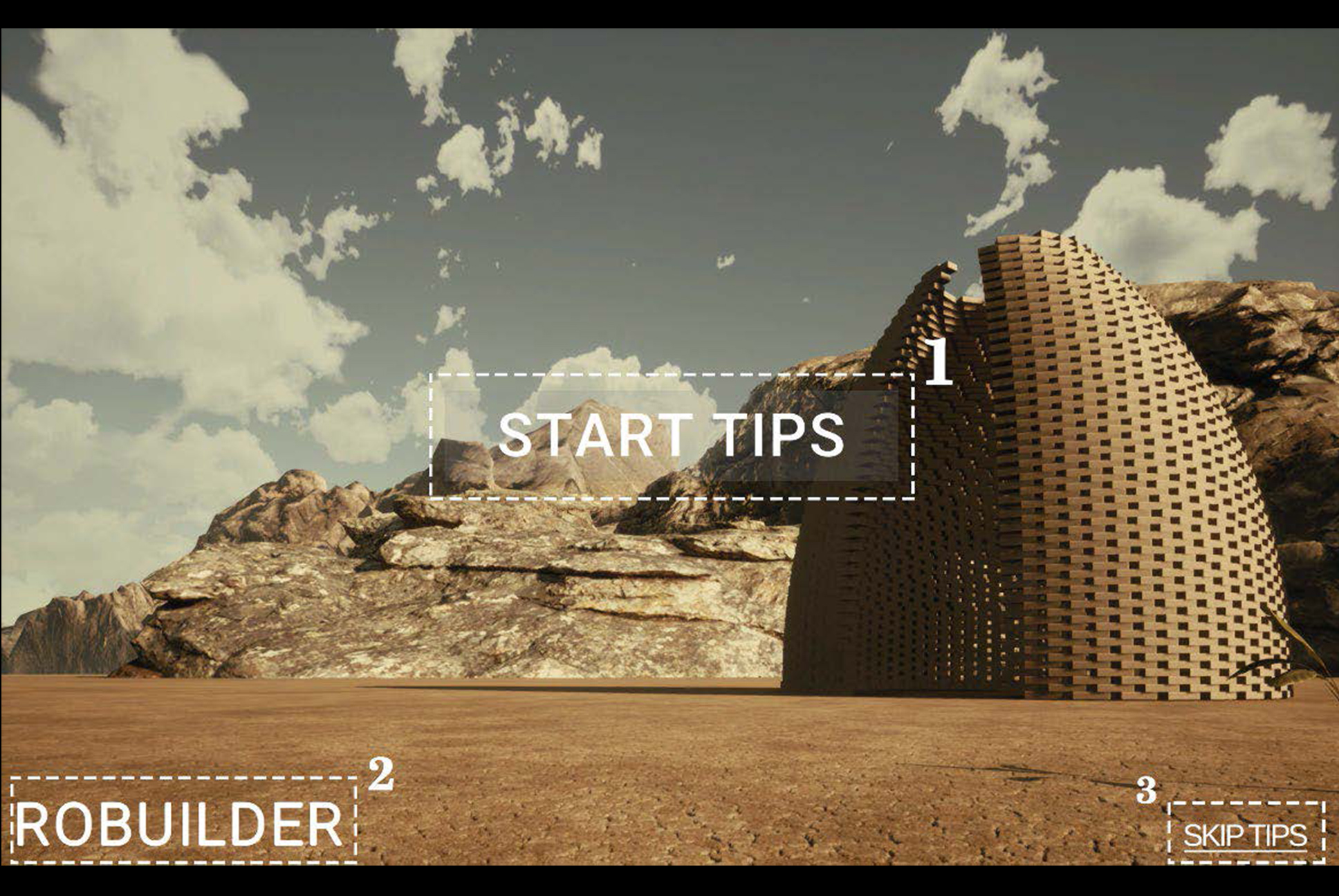
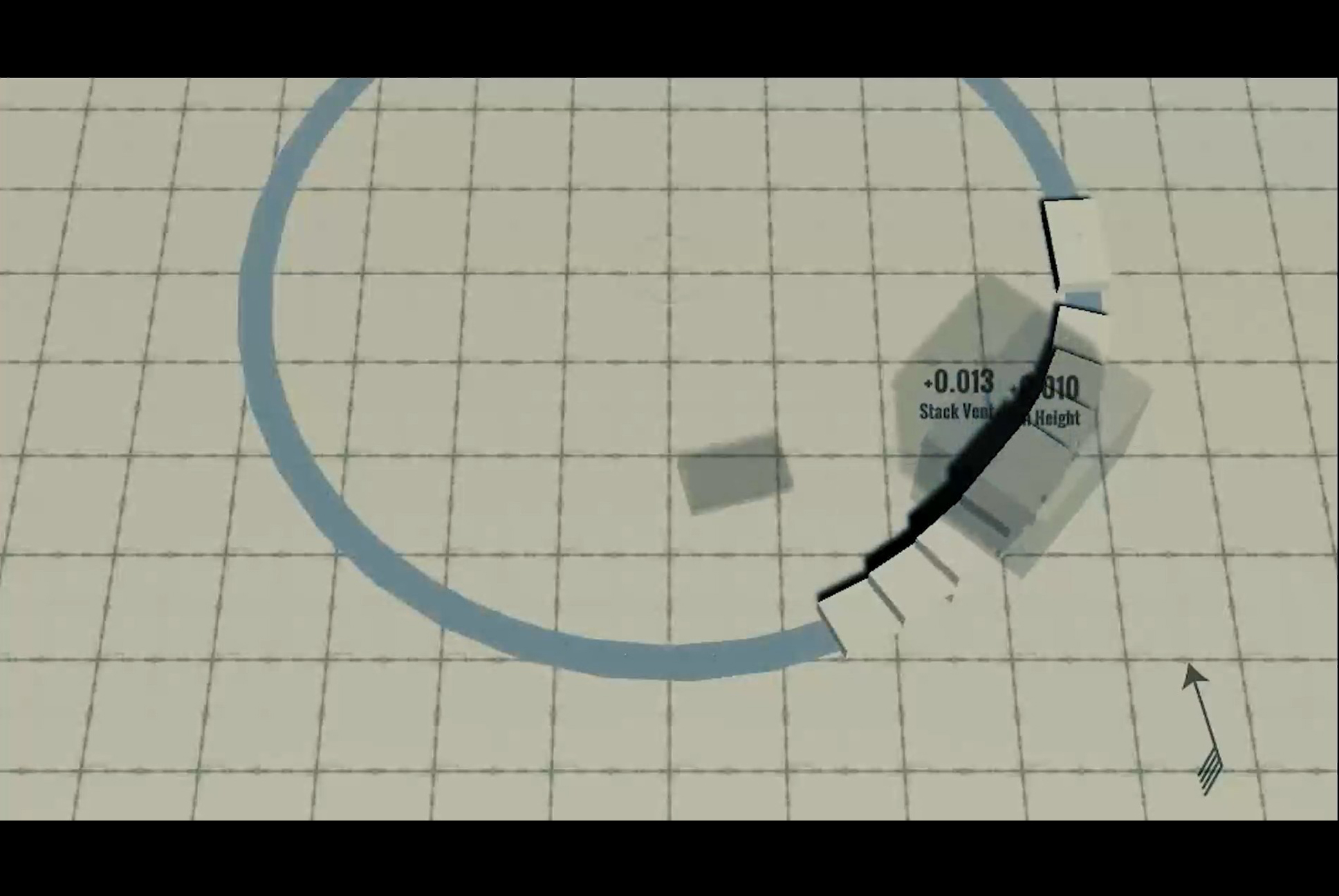
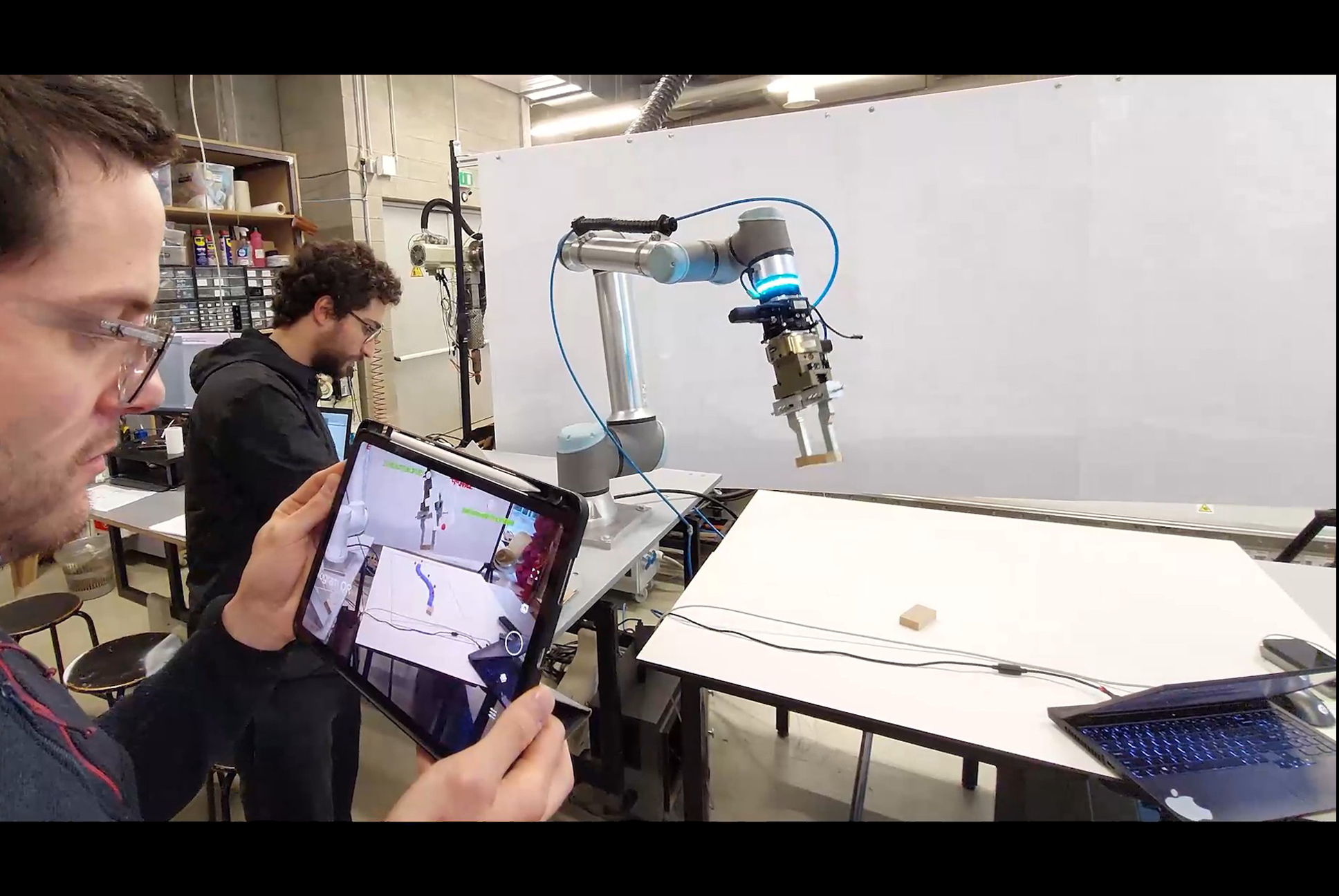
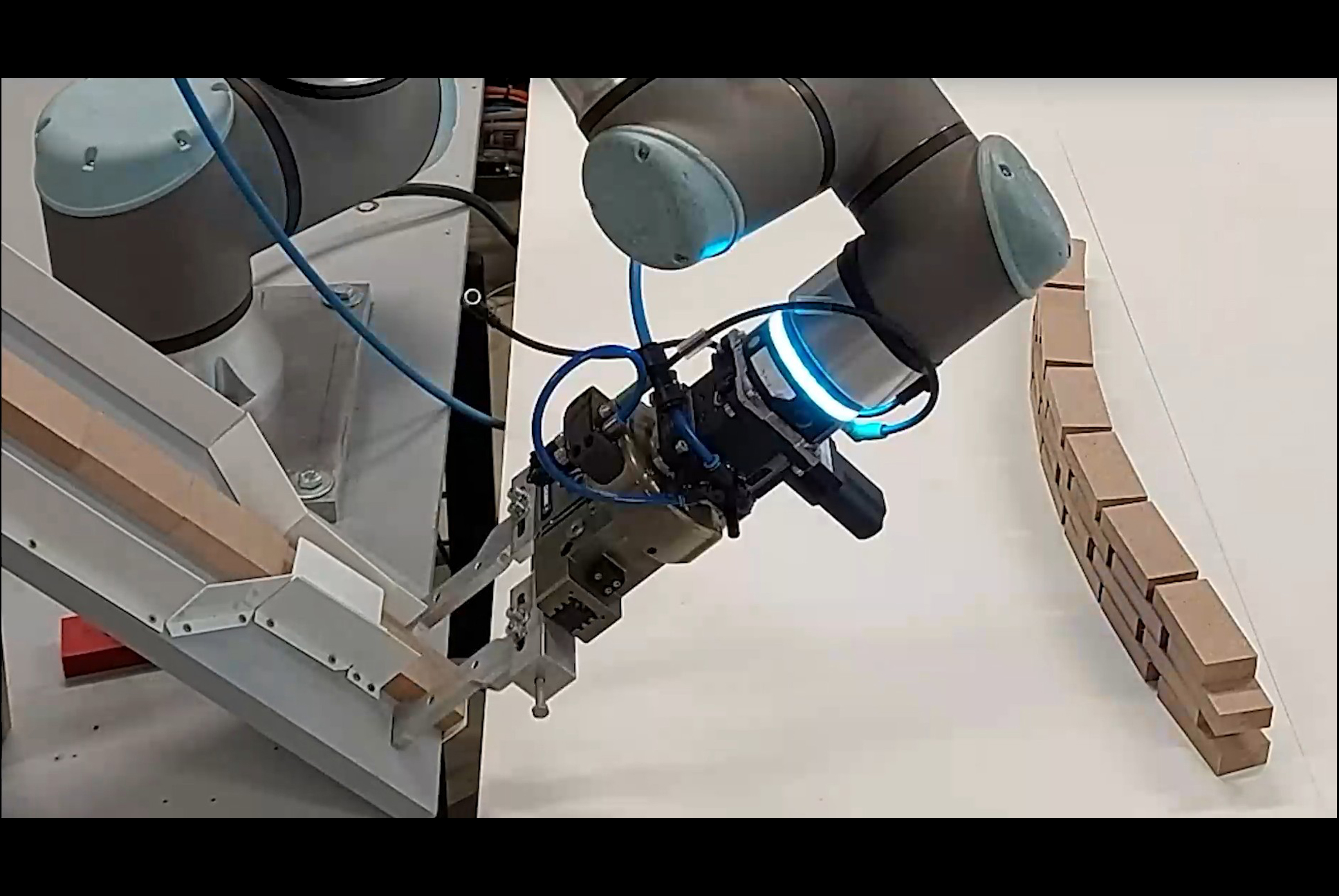
A digital application, RoBuilDer, was developed to test the framework. It includes a human interface for task definition and a robot version for agent training. In simulated construction of a brick pavilion, agents demonstrated the ability to fulfill both structural and spatial requirements. Discrete action strategies outperformed continuous ones, and decomposing tasks across separate neural networks enhanced training speed. The agents learned to respond to penalties and rewards tied to practical design constraints like ventilation, brick stability, and element alignment. The application of curiosity-driven rewards encouraged exploration and non-traditional yet viable solutions.

space
MATERIALS
Digital Materials
PROCESSES
Robotic Tiling and Bricklaying | Artificial Intelligence & Machine Learning
space
ROLES
.
STAKEHOLDERS

LOCATION
.
YEAR
2022
space