HOLOARMOR
Smart wearable boosting safety in human-robot collaboration
HOLOARMOR is a wearable prototype designed to improve safety and efficiency in industrial environments involving human-robot collaboration. It integrates inertial sensors, vision-based tracking, and digital twin models to monitor human posture and spatial dynamics. A chest-mounted array of eight haptic actuators provides real-time tactile warnings, while embedded environmental sensors detect hazardous gases and airborne particles. Still in development, HOLOARMOR aims to expand with capabilities such as radiation detection, fatigue monitoring, and predictive risk analysis, offering a forward-looking approach to intelligent safety in complex industrial scenarios.
In modern industrial contexts, particularly those involving collaborative robotics, safety systems must evolve to meet the demands of dynamic, shared workspaces. Conventional approaches often lack the responsiveness and adaptability needed to prevent accidents in real time. HoloArmor addresses this gap by developing a wearable system that enhances human situational awareness through direct sensory feedback and environmental monitoring. This prototype aims to reduce risks and improve interaction between workers and robotic systems by combining emerging sensing technologies with spatial computation and tactile communication.
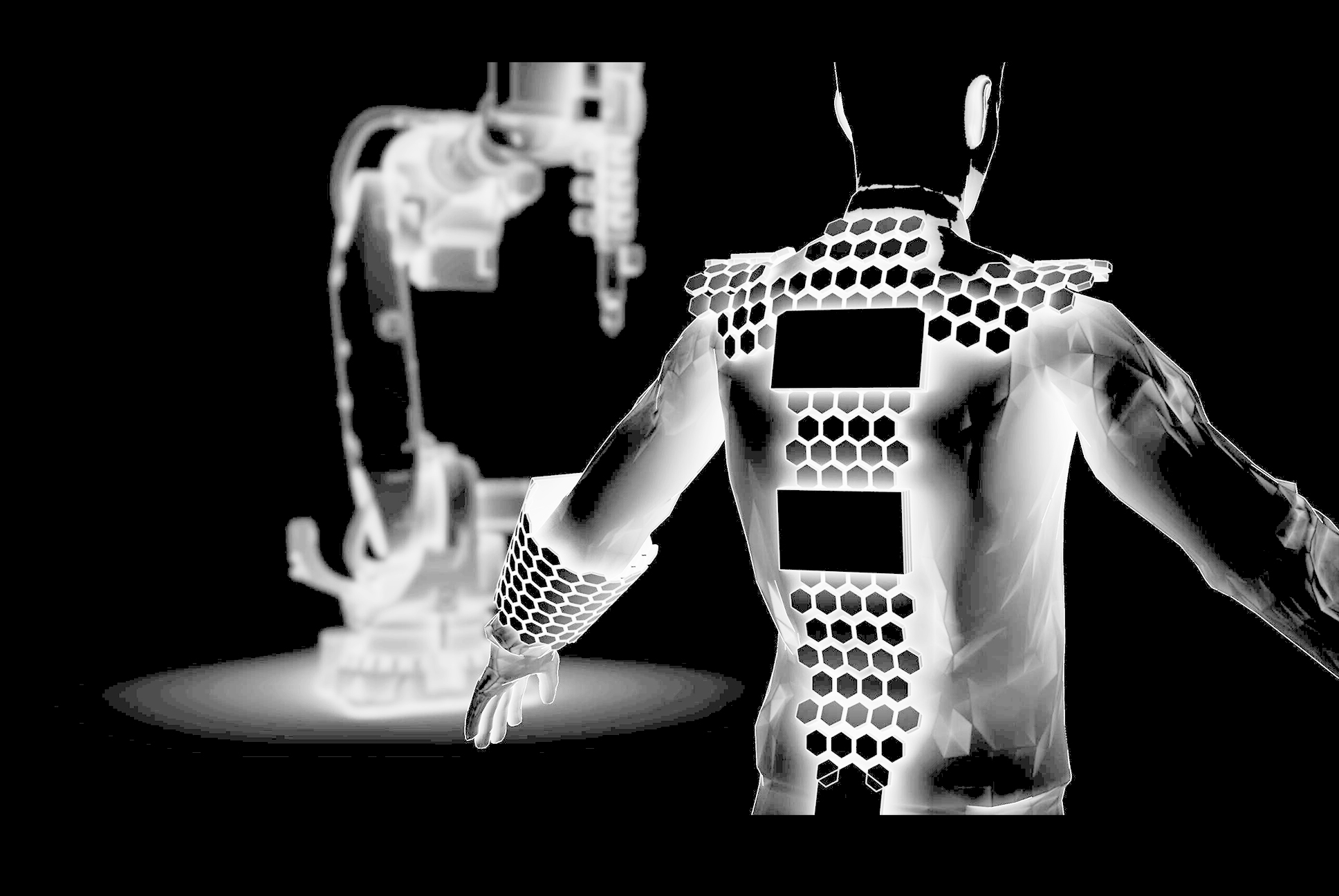



The device integrates multiple sensor types to gather real-time data. Inertial Measurement Units (IMUs) capture the user’s posture and movement, while a vision-based system maps spatial positions relative to robotic arms. These inputs are processed through a digital twin environment, which informs haptic feedback via a series of eight actuators placed on the user’s chest. Concurrently, environmental sensors detect CO2, VOCs, particulate matter (PM2.5 and PM10), carbon monoxide, temperature, and humidity. All data is processed locally to deliver immediate warnings without reliance on external infrastructure.
Initial testing of the prototype demonstrates enhanced user awareness in simulated industrial settings. Haptic alerts effectively communicate proximity and direction of robotic elements, while environmental sensing offers timely detection of air quality threats.
These functions contribute to a safer workspace by reducing human response time and enabling preventative action. Though not yet deployed at scale, the results indicate strong potential for future implementation.
space
MATERIALS
Digital Materials
PROCESSES
Vision System | Mechatronics
DESIGNS
Density-Based Voxel Differentiation
space
ROLES
Indexlab was responsible for the R&D and system integration of HOLOARMOR, the design of the hardware, the development of the digital twin interaction model, and the real-time processing software that links human motion with robotic workspace awareness.
STAKEHOLDERS

LOCATION
First exhibited at Formnext Fair in Frankfurt, Germany
YEAR
2024
space